全國谘詢熱線:
全國谘詢熱線:
+86 158-1184-4241
全國谘詢熱線:
+86 158-1184-4241
Product center

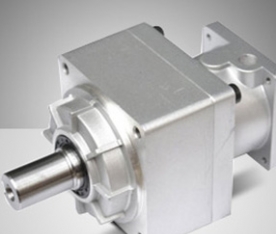
ZPLF係列精密(mì)行星減速機(jī)
ZAF係列精密(mì)行星減速機
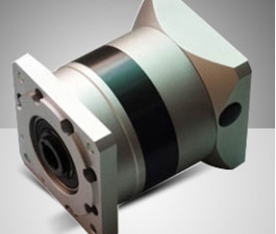
AL係列精密行星減速機
AF係列精密行星減速機
AH係列精密行星減速機(jī)
VLF078係(xì)列精密行星減速機

PLE係列精密行星減速機
PLFK係列行星減速機
Contact us

首頁
發(fā)布時間:2022-01-04 閱讀量:
一、 速度控製
伺服電機本身可以調速,但如果伺服(fú)電(diàn)機調速過低,也會對伺服電機(jī)造成一些抖動等不良現象。此時,需要選擇(zé)合(hé)適的伺服減速機。首先,糖心视频在线观看選擇行(háng)星減速機。需要確定減速(sù)比。有一個簡單的方法:
把電動機的額定(dìng)轉速除以你(nǐ)想要輸出(chū)的轉速,得到你想要的減速比(bǐ)。行星減(jiǎn)速機也有許多速比。找到一個相對接近、成本低、精度高且能滿足要求(qiú)的速比。
選擇減速比後,下一(yī)步就是要選擇合適的伺服減速機類型,因為行星減速機型號選大了(le)成(chéng)本高,選小了又怕減速機(jī)承(chéng)受不了。
下麵是另(lìng)一(yī)種方法:
輸出轉矩是(shì)將電機轉矩乘(chéng)以速比,再參(cān)考行星減速器的軸承轉矩,隻要在行星減速(sù)器的軸承轉矩範圍內,就不會(huì)有(yǒu)問題。
二、位置控製
相對於速度控製,位置控製對(duì)伺服減速機的選擇有(yǒu)著更高的性能要求。主要表現在精度控製方麵。為了實現精確的位置控(kòng)製,涉及到很多方麵。首先,匹配的行星減速機精度能(néng)夠(gòu)滿足要求。如果精度達不(bú)到,就無法實現精確定位。其次,匹配的行星減速器是(shì)否能滿足長期運行的穩定性,是否能達到長期運行間隙不(bú)會變大的(de)問題,配(pèi)備伺服電機的行星減速機的慣(guàn)性是否能滿足要求。是(shì)否(fǒu)想停就能停(tíng)的住,這些都會直接影響到(dào)位置控製的(de)精 準度。
優質(zhì)傳(chuán)動行星減速機采用雙支承結構,保證了高精度長時間運行的穩(wěn)定性,單(dān)極(jí)精度可達(dá)到3弧分以內。至於慣性(xìng)問題,則取決於具(jù)體的模型速比。